Wigglegram Camera
A handheld multi-camera device that captures a “wigglegram” — a quick left/right parallax animation that feels 3D when you tilt or scrub between frames. Built at makeMIT with a fast mechanical prototype, synchronized capture, and a lightweight pipeline to generate a shareable output.
Problem
Wigglegrams are a simple way to convey depth without complex 3D reconstruction — just capture a few viewpoints and play them back as a short loop. The challenge is doing it quickly and consistently: fixed baselines, aligned frames, and a clean export that looks “intentional” rather than shaky.
- Consistent baseline between cameras
- Fast capture and export workflow
- Robust alignment and clean loop
- Hackathon-friendly build speed
Solution
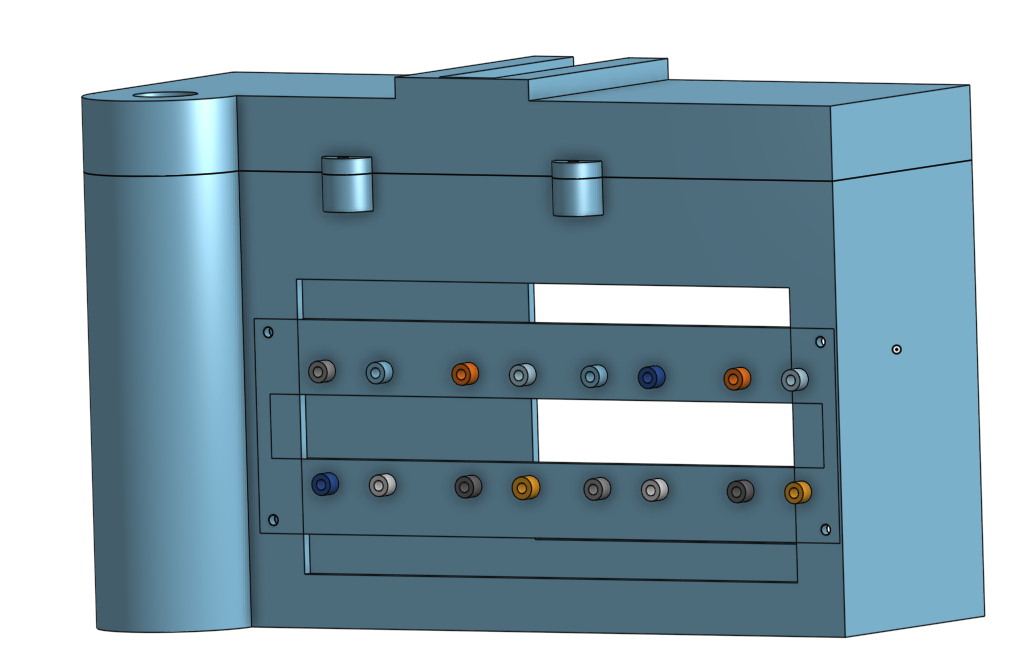
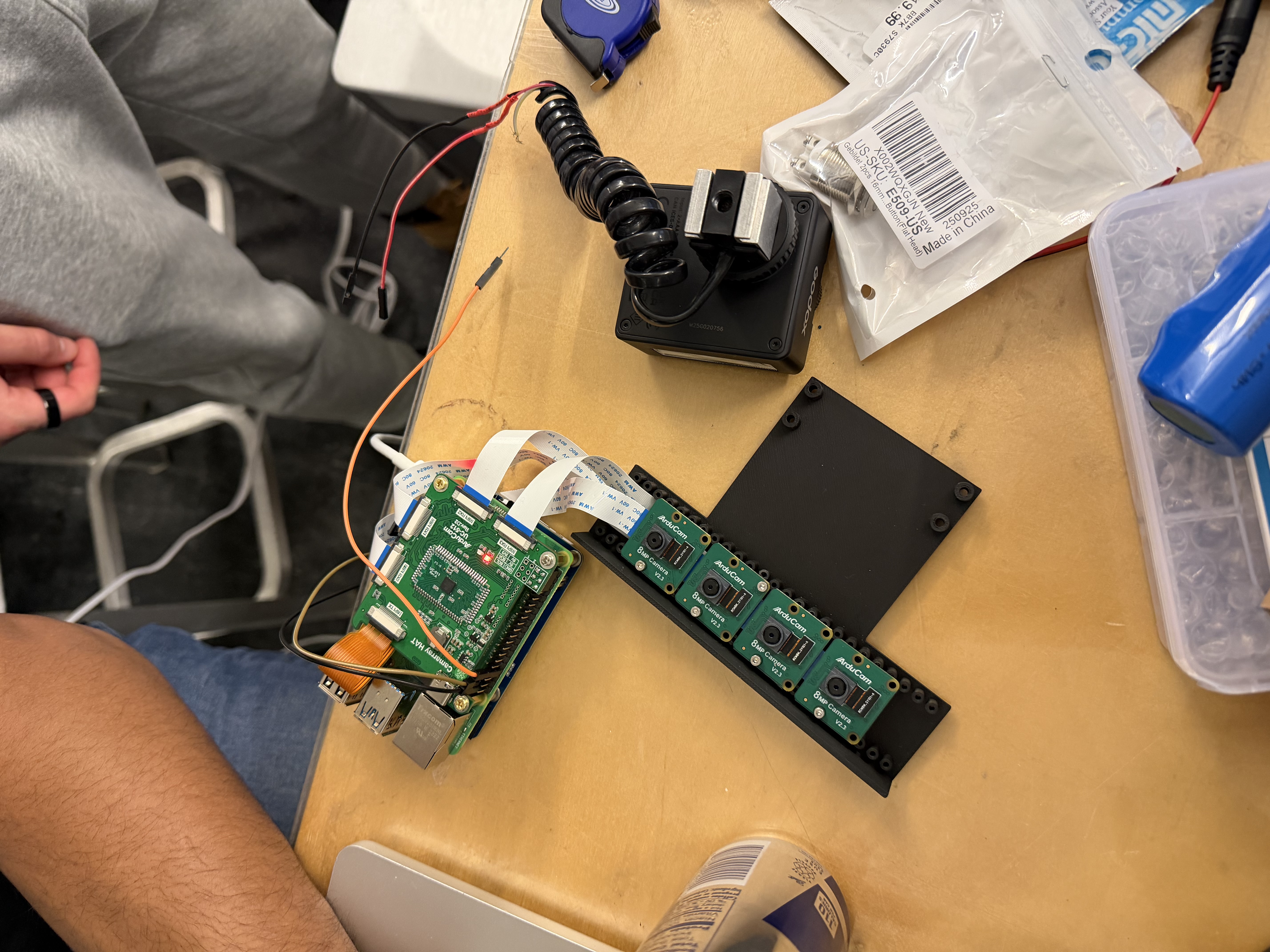
- Rigid multi-camera mount to enforce baseline spacing
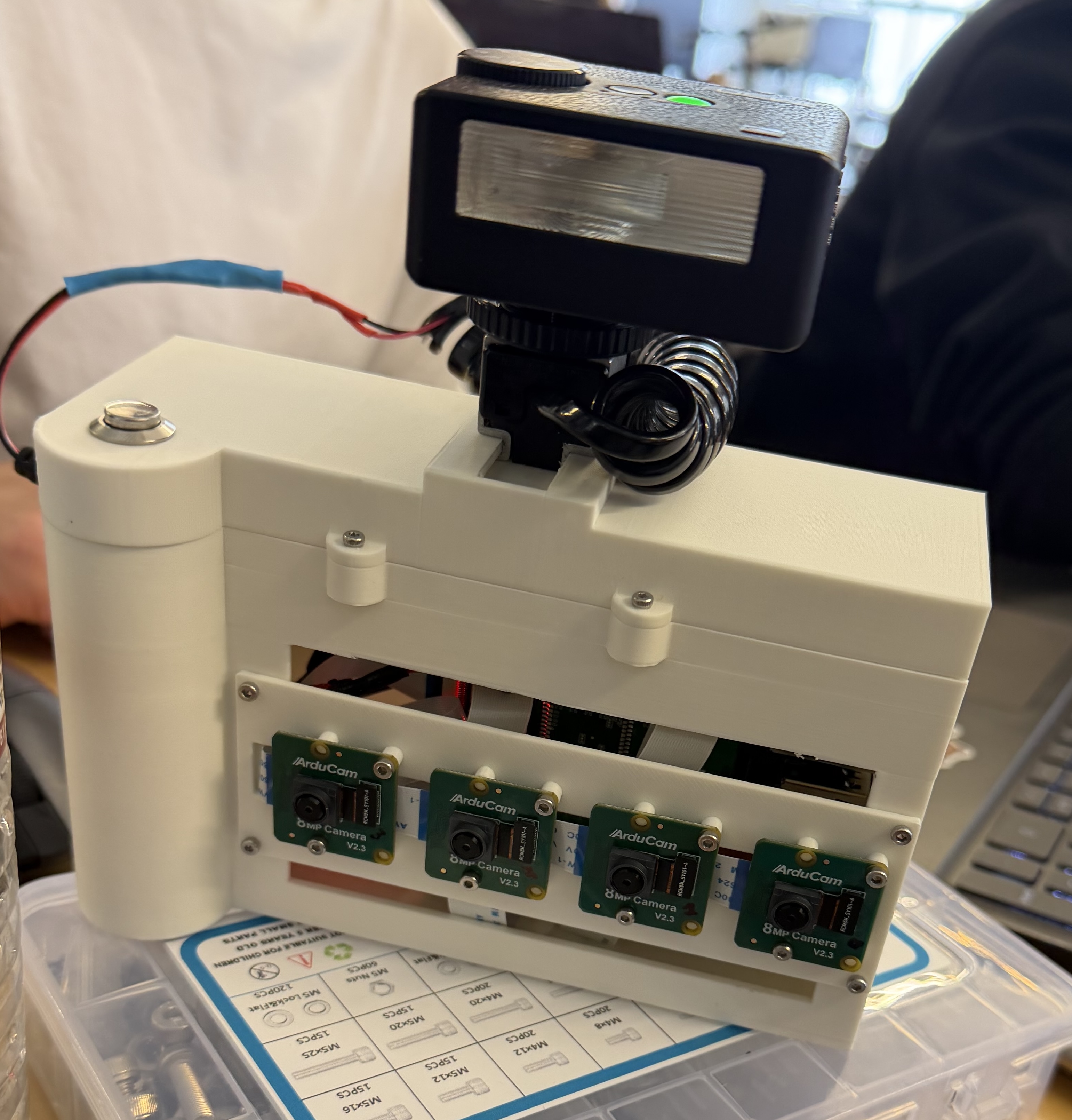
- Compact handheld form factor with a stable grip
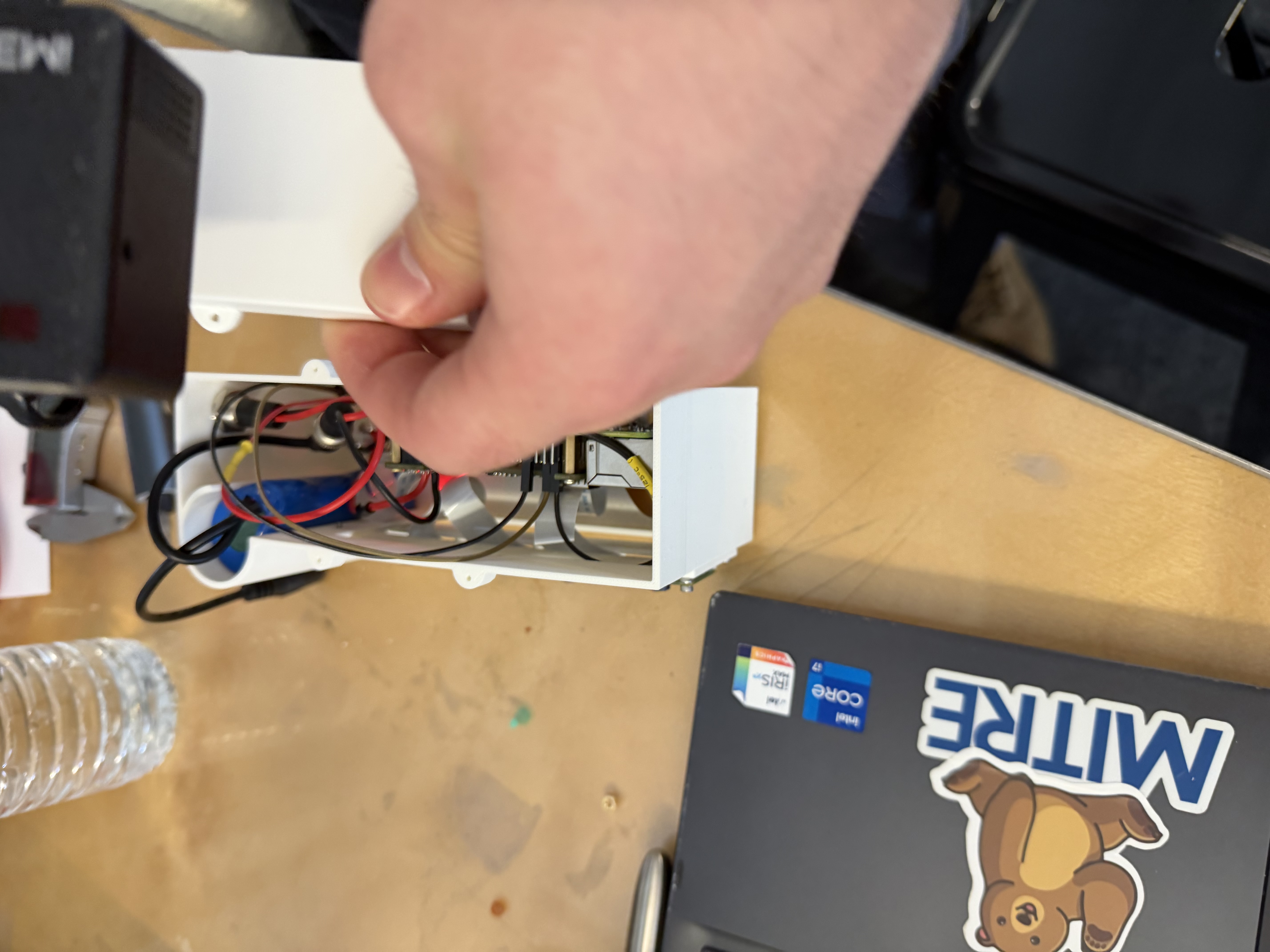
- Quick-access wiring layout for rapid debugging
- Synchronized capture trigger across cameras
- Basic alignment/cropping to normalize framing
- Export pipeline to generate a GIF / short video loop
What I Did
I contributed across mechanical design and build execution: CAD for the camera mount, iteration on fit/clearance for the chosen modules, and rapid assembly decisions to keep the prototype moving. I also supported integration/debug so we could repeatedly capture usable wigglegrams.
The emphasis was making something that looked polished on demo day: repeatable capture, stable geometry, and an output that “reads” as depth immediately.
- Onshape CAD, quick design iteration
- Mechanical packaging + wiring management
- System integration and rapid debug
- Lightweight image/video export scripting
Demo
The final product!
Gallery
Click any image to enlarge (same tab).